
Sodobni motorji z vbrizgavanjem in dizelskimi motorji uporabljajo krmilne sisteme s številnimi senzorji, ki spremljajo več deset parametrov.Med senzorji zavzema posebno mesto fazni senzor oziroma senzor položaja odmične gredi.Preberite o funkcijah, zasnovi in delovanju tega senzorja v članku.
Kaj je fazni senzor
Fazni senzor (DF) ali senzor položaja odmične gredi (DPRV) je senzor krmilnega sistema za vbrizgavanje bencinskih in dizelskih motorjev, ki spremlja položaj mehanizma za distribucijo plina.S pomočjo DF se začetek cikla motorja določi z njegovim prvim valjem (ko je dosežen TDC) in se izvaja sistem faznega vbrizgavanja.Ta senzor je funkcionalno povezan s senzorjem položaja motorne gredi (DPKV) - elektronski sistem za upravljanje motorja uporablja odčitke obeh senzorjev in na podlagi tega ustvarja impulze za vbrizgavanje goriva in vžig v vsakem valju.
DF se uporabljajo samo pri bencinskih motorjih s porazdeljenim faznim vbrizgavanjem in pri nekaterih vrstah dizelskih motorjev.In zahvaljujoč senzorju se najlažje izvaja sam princip faznega vbrizgavanja, to je vbrizgavanje goriva in vžig za vsak valj, odvisno od načina delovanja motorja.V motorjih z uplinjačem DF ni potreben, saj se mešanica goriva in zraka v valje dovaja skozi skupni razdelilnik, vžig pa se krmili z razdelilnikom ali senzorjem položaja ročične gredi.
DF se uporablja tudi pri motorjih s sistemom spremenljivega krmiljenja ventilov.V tem primeru se uporabljajo ločeni senzorji za odmične gredi, ki krmilijo sesalne in izpušne ventile, ter bolj zapletene krmilne sisteme in njihove algoritme delovanja.
Oblikovanje faznih senzorjev
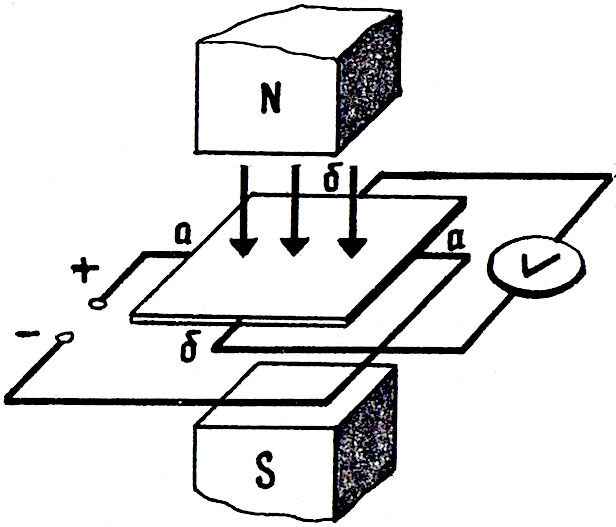
Trenutno se uporablja DF, ki temelji na Hallovem učinku - pojavu potencialne razlike v polprevodniški rezini, skozi katero teče enosmerni tok, ko je postavljena v magnetno polje.Senzorji Hallovega učinka so izvedeni precej preprosto.Temelji na kvadratni ali pravokotni polprevodniški rezini, na katere štiri strani so priključeni kontakti - dva vhodna, za dovod enosmernega toka, in dva izhodna, za odvzem signala.Za udobje je ta zasnova izdelana v obliki čipa, ki je nameščen v ohišju senzorja skupaj z magnetom in drugimi deli.
Obstajata dve vrsti zasnove faznih senzorjev:
- z režami;
- Konec (palica).

Senzor za reže

Končni senzor
Fazni senzor z režo ima obliko U, v njegovem delu je referenčna točka (marker) odmične gredi.Telo senzorja je razdeljeno na dve polovici, v eni je trajni magnet, v drugi je občutljiv element, v obeh delih pa sta magnetna jedra posebne oblike, ki zagotavljajo spremembo magnetnega polja med delovanjem. prehod merila uspešnosti.
Končni senzor ima cilindrično obliko, referenčna točka odmične gredi poteka pred njegovim koncem.V tem senzorju je zaznavni element nameščen na koncu, nad njim sta trajni magnet in magnetna jedra.
Tukaj je treba opozoriti, da je senzor položaja odmične gredi integralen, to pomeni, da združuje zgoraj opisani senzorski element in sekundarni pretvornik signala, ki ojača signal in ga pretvori v obliko, primerno za obdelavo z elektronskim krmilnim sistemom.Pretvornik je običajno vgrajen neposredno v senzor, kar močno poenostavi namestitev in konfiguracijo celotnega sistema.
Načelo delovanja faznega senzorja
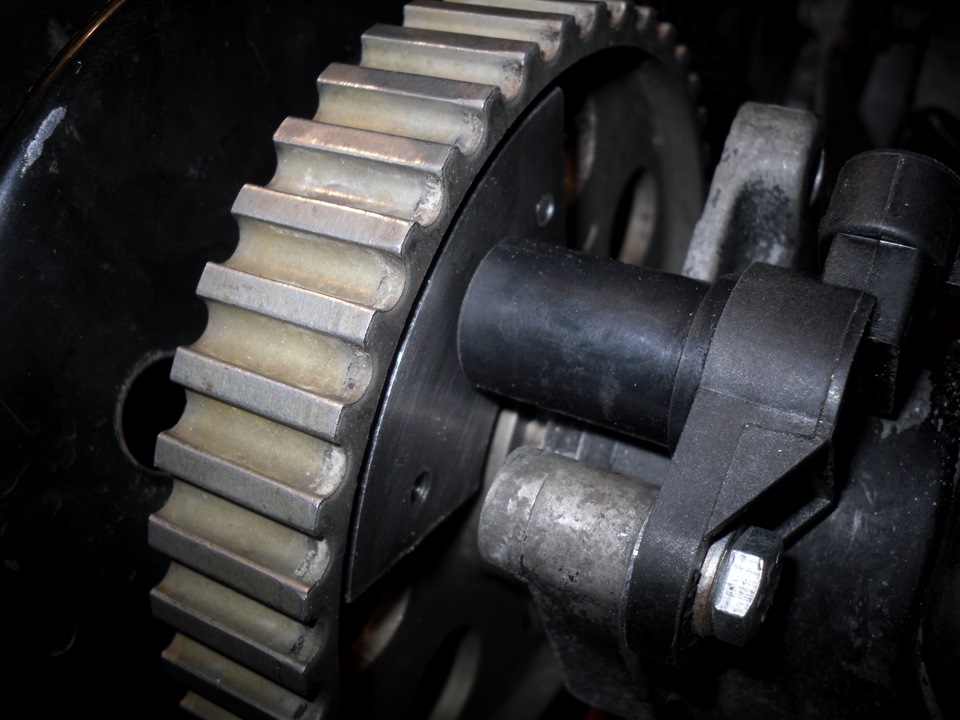
Fazni senzor je povezan z glavnim diskom, nameščenim na odmični gredi.Ta disk ima referenčno točko takšne ali drugačne izvedbe, ki med delovanjem motorja poteka pred senzorjem ali v njegovi reži.Pri prehodu pred senzorjem referenčna točka zapre magnetne črte, ki izhajajo iz nje, kar povzroči spremembo magnetnega polja, ki prečka občutljivi element.Posledično se v Hallovem senzorju ustvari električni impulz, ki ga pretvornik ojača in spremeni ter napaja v elektronsko krmilno enoto motorja.
Za utorne in končne senzorje se uporabljajo glavni diski različnih izvedb.V paru s senzorji z režami deluje disk z zračno režo - pri prehodu te reže se oblikuje krmilni impulz.V paru s končnim senzorjem deluje disk z zobmi ali kratkimi merili - krmilni impulz se oblikuje, ko merilo preide.
Fazni senzor je povezan z glavnim diskom, nameščenim na odmični gredi.Ta disk ima referenčno točko takšne ali drugačne izvedbe, ki med delovanjem motorja poteka pred senzorjem ali v njegovi reži.Pri prehodu pred senzorjem referenčna točka zapre magnetne črte, ki izhajajo iz nje, kar povzroči spremembo magnetnega polja, ki prečka občutljivi element.Posledično se v Hallovem senzorju ustvari električni impulz, ki ga pretvornik ojača in spremeni ter napaja v elektronsko krmilno enoto motorja.
Za utorne in končne senzorje se uporabljajo glavni diski različnih izvedb.V paru s senzorji z režami deluje disk z zračno režo - pri prehodu te reže se oblikuje krmilni impulz.V paru s končnim senzorjem deluje disk z zobmi ali kratkimi merili - krmilni impulz se oblikuje, ko merilo preide.
Čas objave: 24. avgusta 2023